16 QDEC简介
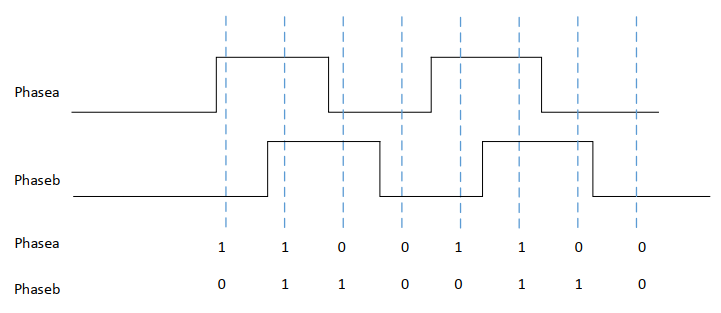
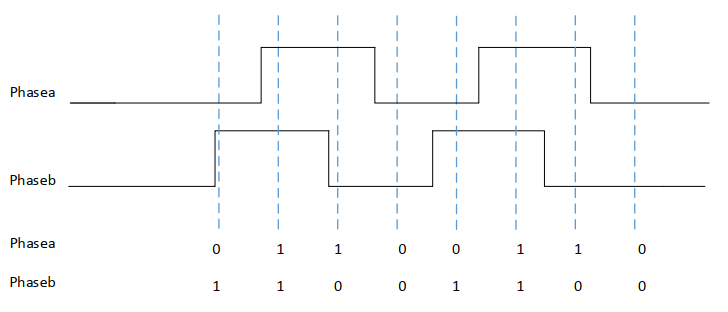
QDEC全称Quadrature Decoder,即正交解码器。
其作用是用来解码来自旋转编码器的脉冲序列,以提供外部设备运动的步长和方向。
16.2 使用方法
16.2.1 方法概述
方法概述为:GPIO选配,时钟配置,QDEC参数配置以及数据处理。
16.2.1.1 GPIO选择
驱动接口:PINCTRL_SelQDECIn
QDEC的GPIO选择,请参考《ING91682X_BLE5.3_芯片数据手册》中的“IO引脚控制器Pin Controller”一节
对phase_a、phase_b选定要配置的GPIO口,并调用PINCTRL_SelQDECIn接口进行配置。
16.2.1.2 时钟配置
驱动接口:SYSCTRL_SelectQDECClk
当前QDEC可以选择使用的时钟源为HCLK时钟或者sclk_slow时钟
出于实际效果和硬件资源等因素考虑,我们推荐开发者选择sclk_slow作为时钟源
对所选用的时钟源还需要进行一次分频,分频系数范围为1-1023,默认值为2
这里需要特别注意的是:如果使用sclk_slow时钟, 请务必配置pclk时钟频率不大于qdec时钟源频率
注意: 如果配置pclk频率大于qdec时钟源频率,会出现qdec参数配置失败从而不能正常工作的现象。
为了方便开发者使用,可以直接调用下面提供的接口来配置pclk时钟符合上述要求:
static void QDEC_PclkCfg(void)
{
if ((APB_SYSCTRL->QdecCfg >> 15) & 1)
return;
uint32_t hclk = SYSCTRL_GetHClk();
uint32_t slowClk = SYSCTRL_GetSlowClk();
uint8_t div = hclk / slowClk;
if (hclk % slowClk)
div++;
if (!(div >> 4))
SYSCTRL_SetPClkDiv(div);
}开发者可以将以上代码拷贝到程序里,在配置qdec之前调用即可。
在配置完qdec之后可以选择将pclk恢复到原来频率,实例可参考SDK中HID mouse例程。
16.2.1.3 QDEC参数配置
驱动接口:QDEC_EnableQdecDiv、QDEC_QdecCfg
共有3个参数需要配置:qdec_clk_div、filter和miss
其含义分别如下:
qdec_clk_div:用于控制qdec结果上报频率。即多少个时钟周期上报一次采样结果
filter:用于过滤filter×时钟周期时长以内的毛刺
miss:用于控制qdec可以自动补偿的最大miss结果数。例如由于滚轮转动过快,导致两次采样中变换了不止一个结果,则此时会自动补偿最多miss个结果。
对于miss值配置此处建议先加入较小的miss值(如miss=1)测试效果,如果效果良好则可以尝试继续加大miss值。在保证性能的基础上,理论上miss值越大越好。
注意: 对于miss值的配置需要格外注意,miss值的设置主要考虑到可能由于转动速度过快导致有数据丢失的情况,但此补偿机制容易受设备信号质量影响。对于信号质量很差的设备,如信号很多毛刺,如果加入miss则可能出现“采样数据跳变”和“换向迟钝”的问题。对于此类设备,建议进行以下几方面尝试:
1. 如选用sclk_slow作为时钟源,检查是否有配置pclk频率小于qdec工作频率
2. 改用较小工作时钟
3. 采用较小的miss值(如miss=1)和较大的filter值
4. 采用较大工作时钟(如HCLK时钟),不加miss进行采样
如果偶尔有较小的数据跳变,如5以内,则需判断其可能属于正常情况。
16.3 编程指南
16.3.1 驱动接口
QDEC_QdecCfg:qdec标准配置接口
QDEC_EnableQdecDiv:qdec_clk_div设置使能接口
QDEC_ChannelEnable:qdec通道使能接口
QDEC_GetData:qdec获取数据接口
QDEC_GetDirection:qdec获取转向接口
QDEC_Reset:qdec复位接口
16.3.2 代码示例
下面一段代码展示了qdec全部配置并循环读数:
static void QDEC_PclkCfg(void)
{
if ((APB_SYSCTRL->QdecCfg >> 15) & 1)
return;
uint32_t hclk = SYSCTRL_GetHClk();
uint32_t slowClk = SYSCTRL_GetSlowClk();
uint8_t div = hclk / slowClk;
if (hclk % slowClk)
div++;
if (!(div >> 4))
SYSCTRL_SetPClkDiv(div);
}
void test(void)
{
// setup qdec
SYSCTRL_ClearClkGateMulti((1 << SYSCTRL_ITEM_APB_PinCtrl) |
(1 << SYSCTRL_ITEM_APB_QDEC));
SYSCTRL_ReleaseBlock(SYSCTRL_ITEM_APB_QDEC);
PINCTRL_SelQDECIn(16, 17); // set GPIO16=phase_a, GPIO17=phase_b
SYSCTRL_SelectQDECClk(SYSCTRL_CLK_SLOW, 100);
QDEC_PclkCfg(); // set pclk not bigger than sclk_slow
QDEC_EnableQdecDiv(QDEC_DIV_1024);
QDEC_QdecCfg(50, 1);
QDEC_ChannelEnable(1);
// print qdec data and direction when rotate the mouse wheel manually
uint16_t preData = 0;
uint16_t data = 0;
uint8_t dir;
while(1) {
data = QDEC_GetData();
dir = QDEC_GetDirection();
if (data != preData) {
if (dir) {
printf("data: %d, %s\n", data, "anticlockwise");
} else {
printf("data: %d, %s\n", data, "clockwise");
}
}
preData = data;
}
}当手动转动鼠标滚轮时,会打印出收到的qdec数据和转向。
推荐开发者采用timer定时轮询的方式读取qdec数据,并进行数据处理和上报。具体的qdec详细使用实例请参考SDK中HID mouse例程。