4 2D 定位
4.1 定位原理
使用 BLE AoA 寻向功能2可以计算目标到天线阵的来波方向对应的方位角、仰角。 假设目标在一个已知的二维平面(或者某些曲面,如半球面)上,根据来波方向可以推算出目标的 2D 坐标, 见图 4.1 。
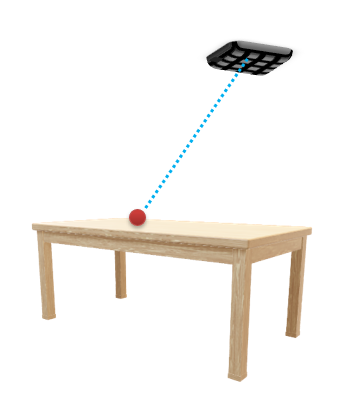
Figure 4.1: 从寻向到 2D 定位
4.2 整体架构
图 4.2 是 2D 定位系统的一个参考设计。
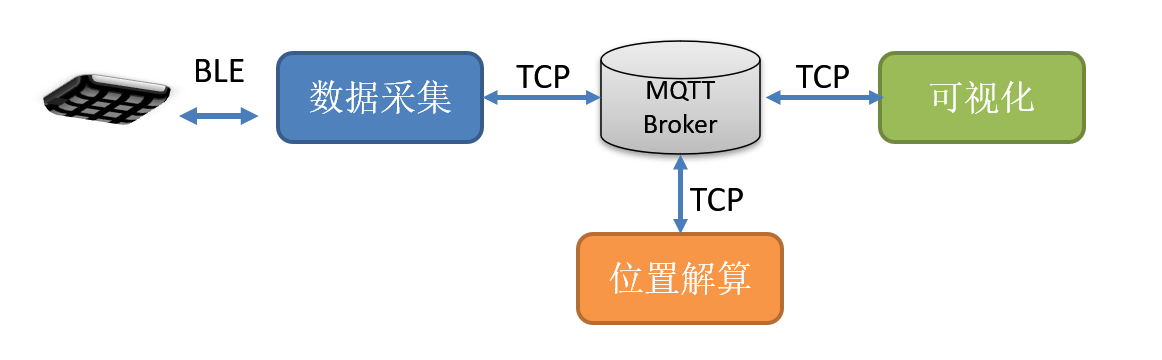
Figure 4.2: 2D 定位整体架构(参考设计)
这个系统使用 MQTT 消息代理(服务器)作为数据中转中心,具有良好的可扩展性、伸缩性,也适合云端部署。
4.3 系统搭建
4.3.1 资源需求及准备工作
要测试 2D 定位系统,至少需要准备以下软硬件资源:
PC 机 1 台,要求:
- Windows 10 及以上
- 支持 BLE,具备 IP 地址(后文假设其 IP 地址为
192.168.100.102) - 新版 Edge 或者 Chrome 浏览器
- MQTT 消息代理,如 Eclipse Mosquitto
- MQTT 调试工具,如 MQTT-Explorer
- Python 开发环境(建议使用 Anaconda3),并按需要安装以下软件包
- Git
ING9188x 开发板 1 块
AoX 天线阵 1 块
准备工作:
4.3.2 标签
使用开发板模块代表待定位的标签,直接烧录 SDK 里的 Peripheral LED & CTE 示例即可。开发者也可以根据测试需要修改程序,比如使用固定蓝牙地址、更改广播名称等。
为开发板上电,保持运行状态。
4.3.4 MQTT 消息代理
需要使能消息代理的 websockets 接口。 以 Mosquitto 为例,找到安装目录下的 mosquitto.conf 文件, 定位到配置 listener 的地方,加入以下几行(IP 地址应当根据实际情况填写):
listener 9001 192.168.100.102
protocol websockets
socket_domain ipv4
listener 1883 192.168.100.102
socket_domain ipv4通过命令 mosquitto -c mosquitto.conf -v 以调试方式启动 Mosquitto,确认
websockets 接口是否打开。如果打开了,会出现类似这样的输出:
Opening websockets listen socket on port 9001杀掉 Mosquitto 进程,并重新通过命令 mosquitto -c mosquitto.conf 以正常方式启动。
尝试用 MQTT 调试工具连接到 Mosquitto,检查是否正常。
4.3.5 数据采集
用浏览器打开软件集里的 BLE2MQTT 工具(ble2mqtt/index.html)。如图 4.3 所示,在两个红色框里分别填写 MQTT 消息代理的 IP 地址和天线阵的蓝牙地址,然后点击 CONNECT TO SERVER 按钮。
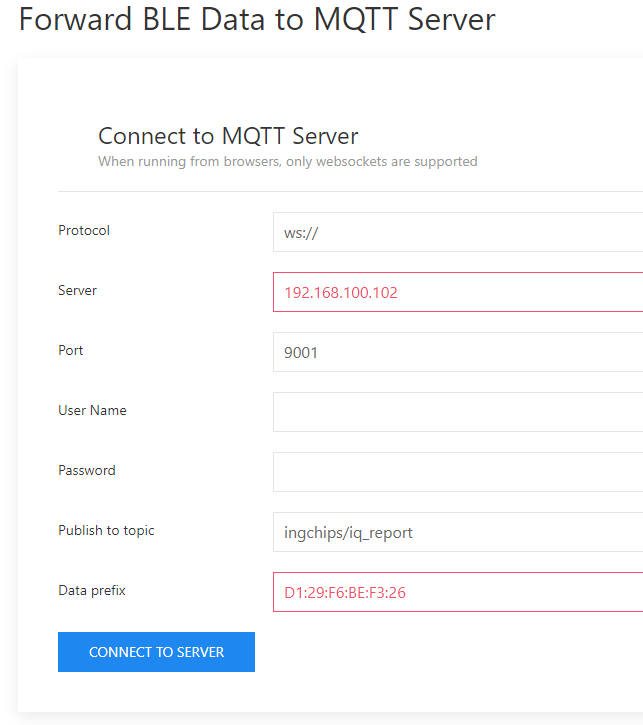
Figure 4.3: 配置 MQTT 消息代理
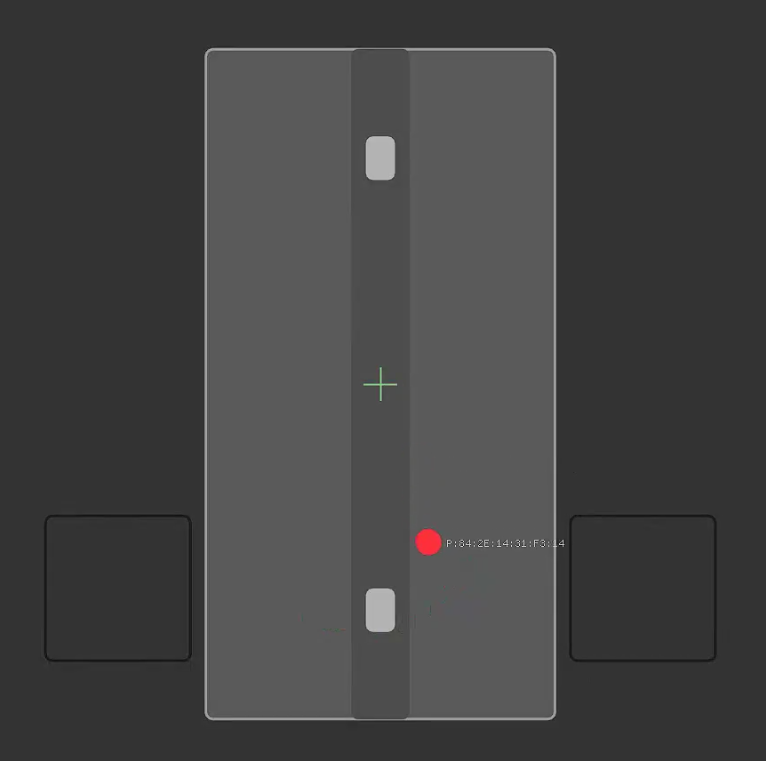
点击 SELECT DEVICE 按钮,浏览器会列出可见的蓝牙设备(如图 4.4),从中找到名为 ING IQ Forwarder 的设备, 点击 配对 按钮(这个按钮上的文字随浏览器版本不同而不同,其真实含义为连接)。
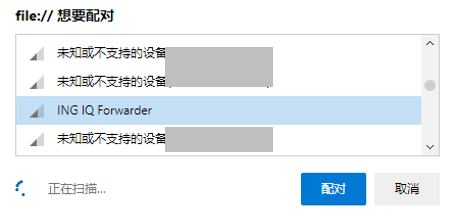
Figure 4.4: 选择蓝牙设备
BLE2MQTT 工具之后就会自动从天线阵收集 CTE 数据并转发到 MQTT 消息代理。界面上会实时显示转发的消息的总数。
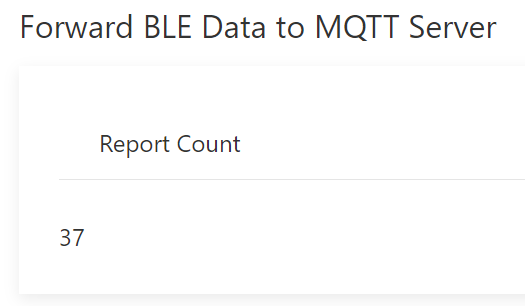
Figure 4.5: BLE2MQTT 工具持续转发消息
这个工具需要一直保持运行。用 MQTT 调试工具可看到消息上报。
4.3.6 环境模型
假定将天线阵固定在天花板下方,定位标签在一个平面内(比如桌子上)移动,桌子在天线阵下方, 如图 4.6。
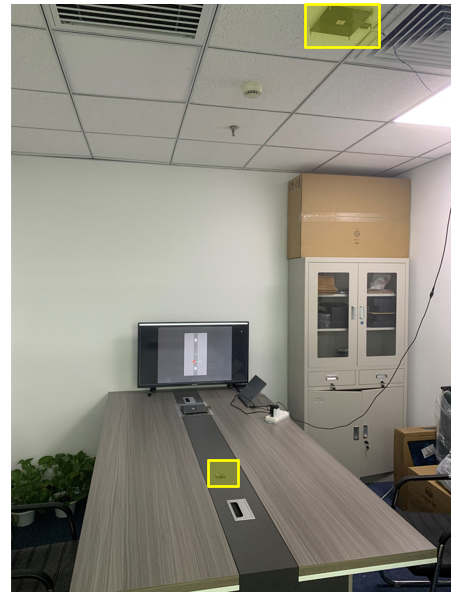
Figure 4.6: 2D 定位测试环境
建立一个三维直角坐标系,定位标签在 \(xoy\) 平面内移动,\(z\) 轴竖直向上,\(x\) 轴方向与天线阵的 \(0 ^\circ\) 方向相同。至于原点的位置则可以随意选取。 确立了这样一个坐标系后,我们就可以表达天线阵的位置,并绘制场景平面图。
天线阵的位置
天线阵的位置由软件集里的 scripts/station_2d.json 文件定义。 下面的内容表示地址为 “D1:29:F6:BE:F3:26” 的天线阵的坐标为 \((0, 0, 1.5)\),即位于原点之上 \(1.5m\) 处。
min_elevation为仰角的最小值,当计算出的仰角超过此范围时(即标签位置距离天线板在 \(xoy\) 平面上的投影太远时),忽略它。场景平面图
场景平面图由软件集里的 scripts/scene.json 文件定义。下面的内容表示整个场景宽度为 \(4m\),高度为 \(3m\), 这里的宽度为场景在 \(x\) 轴方向的跨度,被映射到屏幕的水平方面(即通常意义上的宽度), 高度为场景在 \(y\) 轴方向的跨度,被映射到屏幕的水平方面(即通常意义上的高度)。其它各个域的含义如下:
center为屏幕中心对应的 \(xoy\) 平面上的坐标background为场景的背景颜色entities为一系列简单的图形实体,比如- rect:在场景里绘制一个矩形
- circle:在场景里绘制一个圆
- line:在场景里绘制一条线
每种实体的具体参数可参考
scene.json及 scripts/vis_2d.py 里的draw_scene函数。 颜色由红、绿、蓝、透明度等 4 个分量表示,每个分量都是属于区间 \([0,1]\) 的小数。
Application Note - Direction Finding Solution↩︎