7 GAP - 连接
7.2 使用说明
7.2.1 建立连接
建立连接的过程与主动扫描有相似之处:持续尝试接收某种类型的广播,主动发出一个请求。所以,蓝牙协议规定不要并发地执行这两项任务: 建立连接前要先停止扫描,反之亦然。
在建立连接之前,需要先通过 gap_set_random_device_address 为设备配置地址,这个地址用于扫描、发起连接等场景。
通过 gap_ext_create_connection 建立连接。所连接的目标可以是一个特定的地址,也可以是白名单中的任意一个地址29。
uint8_t gap_ext_create_connection(
// 过滤策略:目标地址来自参数还是白名单?
const initiating_filter_policy_t filter_policy,
// 本设备地址类型
const bd_addr_type_t own_addr_type,
// 目标地址来自参数时,指定目标地址类型
const bd_addr_type_t peer_addr_type,
// 目标地址来自参数时,指定目标地址
const uint8_t *peer_addr,
// 主广播信道的配置个数
const uint8_t initiating_phy_num,
// 主广播信道的配置
const initiating_phy_config_t *phy_configs);另见 从 PAwR 发起连接。
主广播信道的配置 initiating_phy_config_t 指定了每种主广播信道 PHY 的扫描参数(此部分与扫描参数 scan_phy_config_t 相同)及连接参数:
typedef struct {
// 同 scan_phy_config_t
uint16_t scan_int;
uint16_t scan_win;
// 最小连接间隔,单位 1.25ms
uint16_t interval_min;
// 最大连接间隔,单位 1.25ms
uint16_t interval_max;
// 从机延迟(即允许从机跳过多少个连接间隔)
uint16_t latency;
// LE 链路超时时间,单位 10ms
uint16_t supervision_timeout;
// 关于每个连接间隔内连接事件长度的提示信息,单位 0.625ms
uint16_t min_ce_len;
uint16_t max_ce_len;
} conn_para_t;
typedef struct initiating_phy_config
{
phy_type_t phy;
conn_para_t conn_param;
} initiating_phy_config_t;关于每个连接间隔内连接事件长度的提示信息(min_ce_len 和 max_ce_len)不会被传递给从端。Controller 可以借助这个信息更好地调度多种任务。
从端 App 可调用 LL API ll_hint_on_ce_len30 将提示信息告知 Controller。
收到对应的 HCI_EVENT_COMMAND_STATUS 事件,并且 status 为 \(0\),标志着开始执行连接建立任务。
HCI_SUBEVENT_LE_ENHANCED_CONNECTION_COMPLETE 事件标志着连接建立任务的结束。也就是说每次调用这个函数将到达 3 个互斥的终点:
- 函数返回值非 \(0\);
- 上报
HCI_EVENT_COMMAND_STATUS事件,并且status非 \(0\); - 上报
HCI_SUBEVENT_LE_ENHANCED_CONNECTION_COMPLETE事件。
在上一次调用到达终点 3 前,再次调用 gap_ext_create_connection 会到达终点 1 或 2。
复杂应用(如多种蓝牙任务并发)中,务必响应
HCI_EVENT_COMMAND_STATUS
事件检查建立连接命令是否出错(即到达终点 2)。 有时,Controller
会因为无法调度任务而上报 status 为 0x07 的
HCI_SUBEVENT_LE_ENHANCED_CONNECTION_COMPLETE 事件。
对于这种情况,建议 App 延后一段时间再重新尝试建立连接。
7.2.2 取消连接
建立连接需要一定的时间,如果决定不再继续等待,可以通过 gap_create_connection_cancel 取消连接建立任务。
任务取消后,同样会上报 HCI_SUBEVENT_LE_ENHANCED_CONNECTION_COMPLETE 事件,其中的 status 为 0x02
(未知的连接句柄)。
7.2.3 获取对端版本
通过 gap_read_remote_info 可以读取对端协议栈版本。获得版本信息后 Controller 上报 HCI_EVENT_READ_REMOTE_VERSION_INFORMATION_COMPLETE
事件。版本的解析方法可参考 SDK UART GATT Console。
7.2.4 获取对端特性
通过 gap_read_remote_used_features 可以读取对端支持的 BLE 特性。获得特性信息后 Controller 上报 HCI_SUBEVENT_LE_READ_REMOTE_USED_FEATURES_COMPLETE
这个子事件。特性的解析方法可参考 SDK UART GATT Console。
7.2.5 设置 PHY
通过 gap_set_phy 可以设置偏好的 PHY。经过与对方的协商生效后,Controller 上报 HCI_SUBEVENT_LE_PHY_UPDATE_COMPLETE 事件。
gap_set_phy 参数详解:
uint8_t gap_set_phy(
// 连接句柄
const uint16_t con_handle,
// 置起比特 0 表示在发送方向无偏好
// 置起比特 1 表示在接收方向无偏好
// 其它比特保留
const uint8_t all_phys,
// 发送方向上的 PHY 偏好(比特 0 为 0 有效)
const phy_bittypes_t tx_phys,
// 接收方向上的 PHY 偏好(比特 1 为 0 有效)
const phy_bittypes_t rx_phys,
// PHY 的其它选项
const phy_option_t phy_opt);PHY 偏好 phy_bittypes_t 是几个比特的组合:
| 比特序号 | 含义 |
|---|---|
| 0 | 1M PHY |
| 1 | 2M PHY |
| 2 | Coded PHY |
phy_option_t 目前用来指示本端 Coded PHY 采用 S2 或 S8。对于对端,可以在对端 App 里调用 ll_set_conn_coded_scheme 选择 S2 或者 S8。
默认为 S8。
7.2.6 更新连接参数
连接中的主从角色都可以使用 gap_update_connection_parameters31:主角色使用这个函数可以更新连接参数;
从角色使用这个函数则是请求主端更新连接参数:
int gap_update_connection_parameters(
// 连接句柄
hci_con_handle_t con_handle,
// 建议的最小连接间隔(单位 1.25ms)
uint16_t conn_interval_min,
// 建议的最大连接间隔(单位 1.25ms)
uint16_t conn_interval_max,
// 建议的从机延迟
uint16_t conn_latency,
// 建议的超时时间(单位 10ms)
uint16_t supervision_timeout,
// 关于每个连接间隔内连接事件长度的提示信息,单位 0.625ms
// (从角色忽略这两个参数)
uint16_t min_ce_len,
uint16_t max_ce_len);事件 HCI_SUBEVENT_LE_CONNECTION_UPDATE_COMPLETE 标志着参数更新完成。
7.2.7 减速模式
减速模式的使用方法可参考 SDK UART GATT Console。
减速(Subrating)模式为中心设备和外围设备定义了一种统一的节奏,在保证通信的持续性前提下跳过若干连接间隔,减少射频占用、降低功耗。
调用 gap_subrate_request32 即可在主从两端协商启动减速模式。
uint8_t gap_subrate_request(
// 连接句柄
hci_con_handle_t con_handle,
// 最小减速比
uint16_t subrate_min,
// 最大减速比
uint16_t subrate_max,
// 最大从延迟(单位:减速后连接间隔)
uint16_t max_latency,
// 最小连续传输次数
uint16_t continuation_number,
// 超时时间(单位 10ms)
uint16_t supervision_timeout);例如,将连接 0 的减速比设置为 8,在双方无数据传输时,每 8 个连接间隔对发 1 次空包维持连接:
gap_subrate_request(0, 8, 8,
0, 0, 2000);使用 BLE 空口抓包工具或者高端电流表可观察到这种减速行为,见图 7.1。
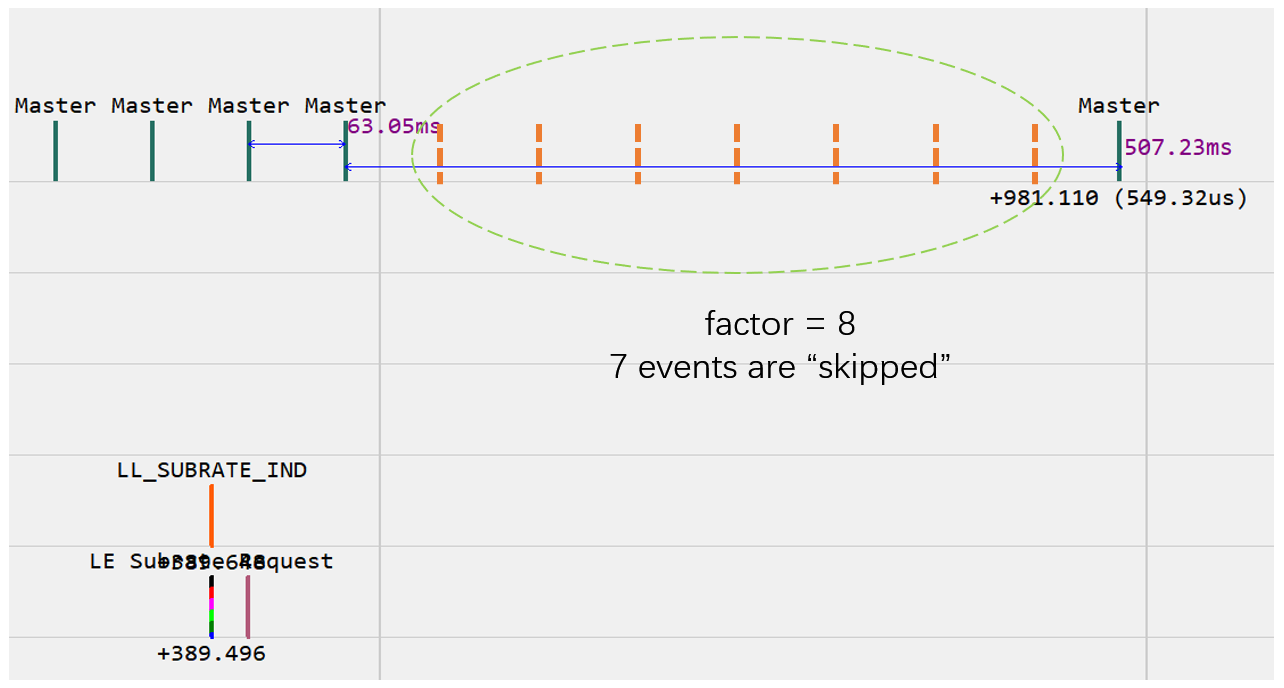
图 7.1: 减速比为 8 时的行为
continuation_number 表示每个减速周期开始时,至少再连续传输多少个连接间隔。如果为 1,在上述配置下当双方无数据传输时,每 8 个连接间隔有 2 个激活;
如果为 7,则每个连接间隔有 8 个激活,即都激活。
启用减速模式后,从机延迟的单位从原来的连接间隔变为 (连接间隔 \(\times\) 减速比)。
减速参数更新后,HCI 回调函数会收到 HCI_SUBEVENT_LE_SUBRATE_CHANGE 事件。
当出现通信需求时,可以迅速从减速模式回到连接通信模式,兼顾功耗与效率,如图 7.2。
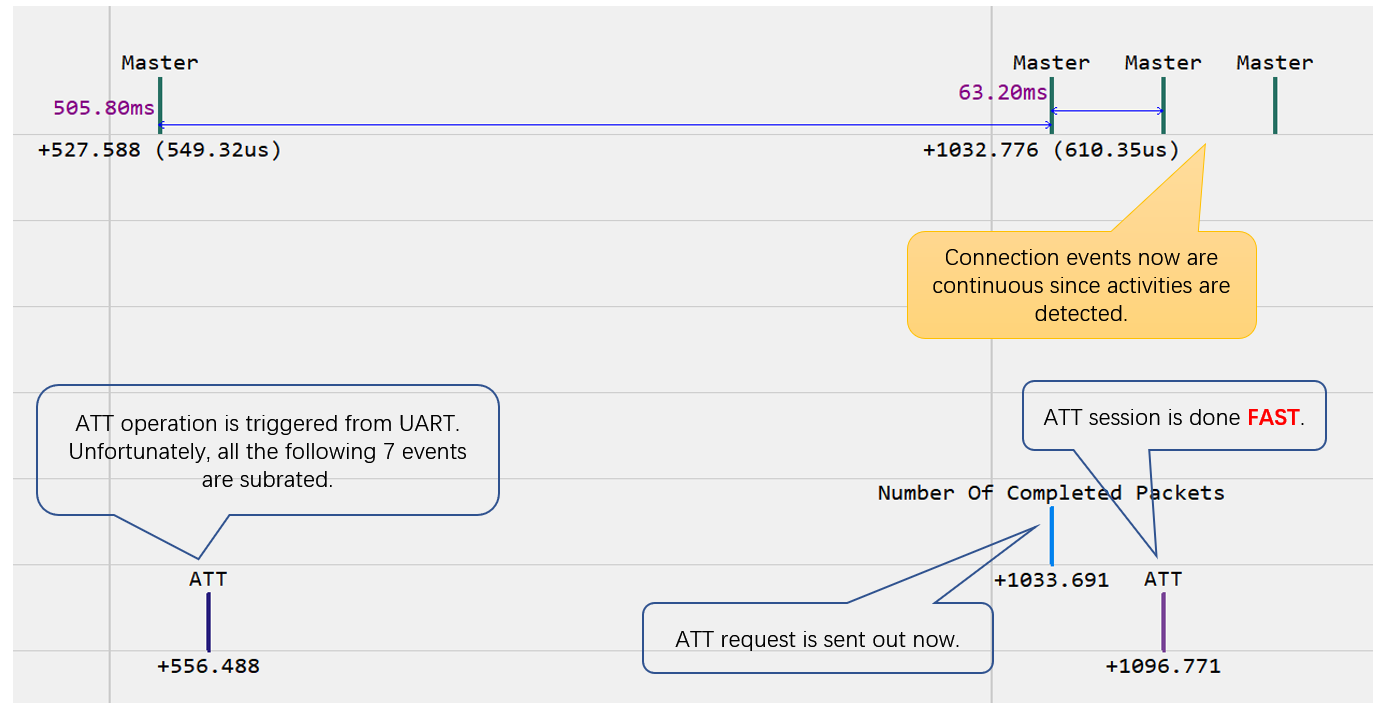
图 7.2: 减速下出现数据通信
通过 gap_set_default_subrate 设置 Controller 所接受的减速模式参数范围。
uint8_t gap_set_default_subrate(
uint16_t subrate_min,
uint16_t subrate_max,
uint16_t max_latency,
uint16_t continuation_number,
uint16_t supervision_timeout);7.2.8 路损检测与上报
BLE 5.2 为路径损耗定义了 3 种分类(或者分区,zone),高损耗、中损耗和低损耗。 Controller 监控损耗情况,当损耗分类发生改变时(图 7.3 中的虚线箭头),上报 HCI_SUBEVENT_LE_PATH_LOSS_THRESHOLD 事件。
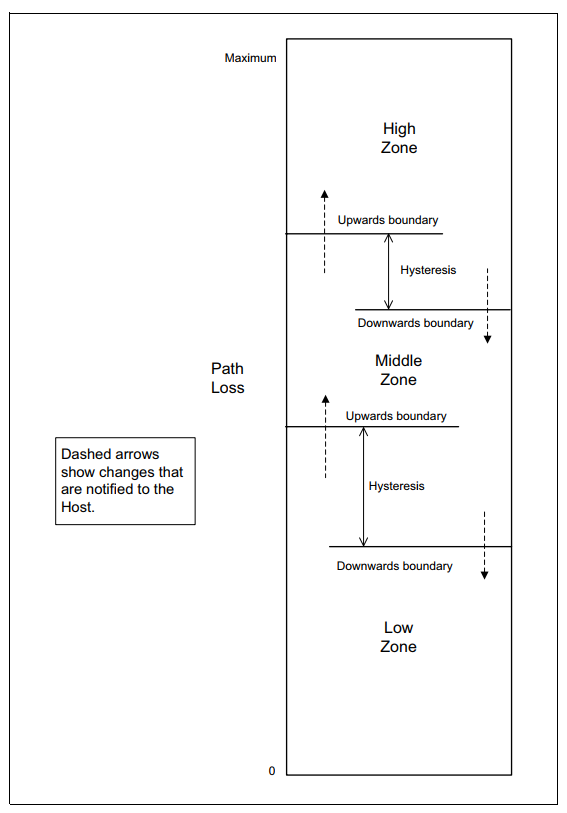
图 7.3: 路径损耗上报
配置路损分类参数:
uint8_t gap_set_path_loss_reporting_param( hci_con_handle_t con_handle, // 连接句柄 uint8_t high_threshold, // 高路损门限 uint8_t high_hysteresis, // 高路损迟滞 uint8_t low_threshold, // 低路损门限 uint8_t low_hysteresis, // 低路损迟滞 uint8_t min_time_spent); // 最小停留时间(单位连接间隔)图 7.3 中的 upwards boundary 为 (threshold + hysteresis), downwards boundary 为 (threshold - hysteresis)。
使能上报:
uint8_t gap_set_path_loss_reporting_enable( hci_con_handle_t con_handle, // 连接句柄 uint8_t enable // 使能 );
7.2.9 功率控制
功率控制的使用方法可参考 SDK UART GATT Console。
读取发射功率
读取本端发射功率:
uint8_t gap_read_local_tx_power_level( hci_con_handle_t con_handle, // 连接句柄 unified_phy_type_t phy // PHY );从对应的
HCI_EVENT_COMMAND_COMPLETE事件的返回参数中取得发射功率值:uint8_t Status, // 状态码 uint8_t Connection_Handle, // 连接句柄 uint8_t PHY, int8_t Current_TX_Power_Level, // 当前发射功率(dBm) int8_t Max_TX_Power_Level // 最大发射功率(dBm)读取对端发射功率:
uint8_t gap_read_remote_tx_power_level( hci_con_handle_t con_handle, // 连接句柄 unified_phy_type_t phy // PHY );从
HCI_SUBEVENT_LE_TRANSMIT_POWER_REPORTING事件中取得发射功率值。设置发射功率
设置本端发射功率:
void ll_set_conn_tx_power( uint16_t conn_handle, // 连接句柄 int16_t tx_power // 发射功率(dBm) );调整对端发射功率:
void ll_adjust_conn_peer_tx_power( uint16_t conn_handle, // 连接句柄 int8_t delta // 调整量,正值为增大,负值为减小(dB) );发射功率自动上报
uint8_t gap_set_tx_power_reporting_enable( hci_con_handle_t con_handle, // 连接句柄 uint8_t local_enable, // 使能本端上报 uint8_t remote_enable // 使能对端上报 );