目前市场上可见几种具备自动跟随功能的行李箱,多依靠视觉或者 UWB 技术实现。 本文介绍如何利用 BLE AoA 寻向技术开发一个具有自动跟随功能的小车。这个小车能够跟随信标前进、转向、停止。
项目源代码 注意: 本文及参考代码仅为概念演示,不考虑信标与小车的配对等问题。
整体框架
自动跟随小车主要包括以下部件、模块。
| 名称 | 功能 |
|---|---|
| ING9188xx 4x4 URA 天线阵 | CTE 采集,主控 |
| 树莓派 Raspberry Pi Zero | 负责 AoA 计算 |
| 智能小车底盘 | 包含车架、电机、转向舵机 |
| TB6612 电机驱动模块(带 3.3V 输出) | 底盘电机驱动,为天线阵供电 |
| 可调 DC-DC 模块 | 为树莓派、舵机提供 5V 输出 |
| 128x64 OLED 模块(驱动芯片 SSD1306) | 显示调试或者状态信息(可选) |
| 锂电池 | 提供动力 |
| 若干杜邦线 |
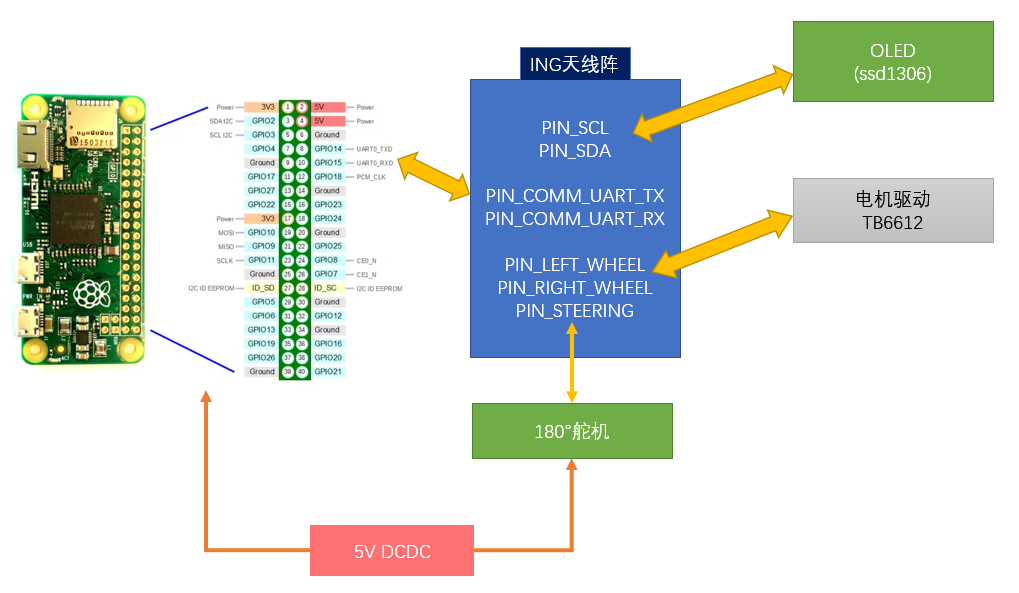
小车的框图如下所示。其中主控为 4x4 URA 上的 ING9188xx,它将采集到的 CTE 数据提交到树莓派完成方位角解算,再据此调整小车的前进方向。 另外需要一块 ING9188xx 开发板用来发送 CTE 信标(烧录 Peripheral LEC & CTE 即可),引导小车前进。 OLED 模块可用来显示调试或者状态信息,它的驱动、使用方法参考 Central Throughput。 由于树莓派及底盘上的舵机都需要 5V 电源,且耗电较大,所以使用了 DC-DC 模块提供 5V 输出。
主要功能详解
1. 底盘控制
由于天线阵的 IO 口数据有限,小车只能前进,不能后退。有关 TB6612、电机的驱动、舵机控制等,请参考 蓝牙遥控车。
Q:树莓派 IO 丰富、功能强大,为什么不用它做主控?
A:我们总是倾向于使用自己的产品。
2. CTE 采集
AoX 算法时间、空间复杂度都非常大,无法在 ING918 这样的低功耗 SoC 上运行。事实上,即便对于树莓派的低端型号 Raspberry Pi Zero 来说, 进行 4x4 全阵列计算仍然非常吃力。考虑到我们只需要方位角,可以只使用 $1 \times 4$ ULA 子阵列,Pi Zero 完成一次计算大概需要 $0.1s$。
实现上,仿照 Central CTE,以扩展广播 + 桃芯扩展的方式采集 CTE,经过 Base64 编码后送入树莓派进行方位角解算。
3. 树莓派的控制
主控通过串口登录到树莓派并启动寻向算法程序 alg -array 1x4。
之后的任务是将 Base64 编码的 CTE 数据送入树莓派,然后解析 JSON 格式的解算结果。
实现时要考虑:
- 树莓派的启动时间长,登录 Shell 时要判断输出然后填写用户名、密码;
- 解析 JSON 结果时,算法程序可能报错(
status != 'ok'); - 主控程序重新执行(调试、更新程序),树莓派已经处于登录状态(重启树莓派效率太低),需要做判断。
以上几种情况可能导致相关代码比较混乱。
4. 转向控制
小车的转向采用 PID 控制:
- 误差:(当前方位角 - 目标值)
- 被控量:舵机角度
我们把 $K_i$ 参数设置为 $0$,即只使用 $P$、$D$ 两项进行控制。
5. 速度控制
基本原理是小车距离信标比较远时速度快一些,反之就慢一些。但是根据 RSSI 估计距离效果很差, 我们联合使用了一个 Kalman 滤波器和一个 IIR 滤波器尝试提高距离估计的准确度。
6. 停车控制
安全第一,为了 1) 防止小车撞到自己的脚,2) 实现“急停”功能,在速度控制之外使用迟滞比较器实现了一个单独的停车控制逻辑:一旦(原始)RSSI 值超过某个门限(RSSI_LOCK),就立即停车,并屏蔽其它速度控制逻辑;当(原始)RSSI 低于另一个门限时,解除停车,允许其它速度控制逻辑控制小车移动。
测试
参考 pin_def.h 及上面的整体框图搭建硬件。我们搭建的小车如图所示,附加了一个内置 ING9187xx 芯片的 Insta360 GO 2 用来拍摄 FPV 视频:

各模块使用的软件总结如下:
| 模块 | 软件 |
|---|---|
| ING9188xx 4x4 URA 天线阵 | 本文所介绍的 app |
| 树莓派 Raspberry Pi Zero | Raspberry Pi OS 及 alg |
| ING9188xx 开发板 | Peripheral LEC & CTE |
源代码里附带了 FOTA 功能,完成初次烧录后,通过 OTA 就能方便地升级。建议根据实际情况调整 REF_RSSI (即小车在距离信标 $1m$ 远处所接收到的信号强度),
以改善速度控制、停车控制的效果。